mpython_classroom_kit --- 掌控板实验箱模块¶
mpython_classroom_kit 模块提供实验箱上的传感器和输出设备的驱动函数,及人工智能应用的相关函数。
Contents
mpython_classroom_kit--- 掌控板实验箱模块
函数¶
-
mpython_classroom_kit.get_distance()¶
获取超声波传感器测距值,单位cm。范围3~340CM
-
mpython_classroom_kit.set_motor(speed)¶
设置马达速度
speed- 马达速度,范围±100。正值表示正转,负值则反。
-
mpython_classroom_kit.get_key()¶
获取方向按键,返回已按下按键的集合。当单个或多个按键按下,可以集合(set)运算,判断按键状态。
集合所有元素如下: {'left', 'right', 'up', 'down', 'ok'}
1 2 3 4 5 6 7 8 9 10 11 12 13 14 | from mpython_classroom_kit import *
import music
while True:
# 按下左键,马达左转
if get_key() == {'left'}:
set_motor(-100)
# 按下右键,马达右转
elif get_key() == {'right'}:
set_motor(100)
# 同时按下OK、下键,马达停止
elif get_key() == {'ok', 'down'}:
set_motor(0)
|
-
pir.value()¶
返回人体红外触发值。当为1时,表示已触发。
-
slider_res.read()¶
返回滑杆电阻采样值。范围0~4095。
1 2 3 4 5 6 7 8 9 10 11 12 | # 滑杆控制马达转速
from mpython_classroom_kit import *
from mpython import *
while True:
# 读取滑杆电阻值
slider_value= slider_res.read()
# 将电阻值映射至(-100,100)
speed = numberMap(slider_value,0,4095,-100,100)
print("speed: %d" %speed)
# 设置马达转速
set_motor(speed)
|
神经网络模型¶
model支持yolov2和MobileNet卷积神经网络模型。内置人脸追踪,20类追踪,Mnist手写数字,1000分类器的应用模型。
-
model.select_model(builtin)¶
内置神经网络模型加载
builtin
model.FACE_YOLO1 人脸追踪,yolov2 model.CLASS_20_YOLO2 20类追踪,yolov2 model.MNIST_NET3 手写数字(Mnist)图像分类器,MobileNet model.CLASS_1000_NET4 1000类图像分类器,MobileNet
注意
1000分类器功能未实现,暂不开放。
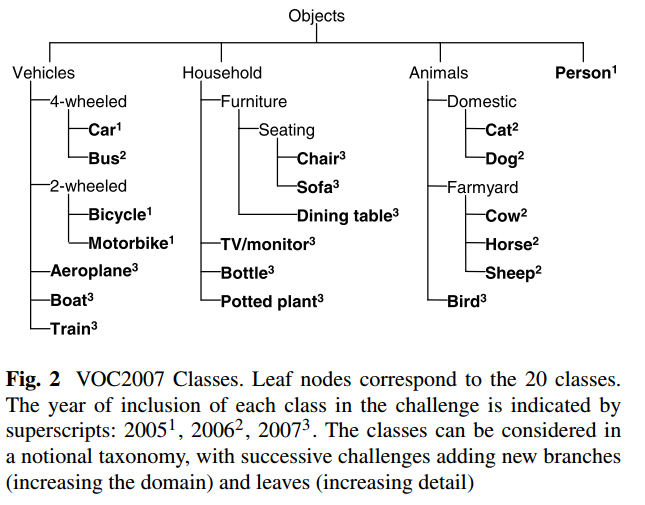
PASCAL VOC挑战赛 20类别说明
-
model.load_model(path, model_type, classes, anchor=None)¶
加载外部神经网络模型
path- 模型路径,字符串类型。模型应存放在SD卡中。
model_type- 神经网络模型类型
model.YOLO2- 1model.MOBILENET- 2
classes- 分类标签,类型数组。计算得出结果将返回类别索引,对应该数组。
anchor- 在yolo模型上使用,锚点参数与模型参数一致。
-
model.detect_yolo()¶
yolo追踪模型计算。返回已侦测到的物体数组,json数据包含物体所在的矩形 x , y , w , h 。value 为侦测物体的相似率。 classid 为识别物体的类别,类型为数字类型。 index 为侦测到物体的json数据索引。
-
model.predict_net()¶
MobileNet模型计算。返回预测图形分类的概率数组。
-
model.deinit_yolo()¶
使用yolo模型计算后,释放资源。
-
model.deinit_net()¶
使用MobileNet模型计算后,释放资源。
1 2 3 4 5 6 7 8 9 10 11 | from mpython import *
from mpython_classroom_kit import *
# 加载face detect yolo模型
model.select_model(model.FACE_YOLO)
while True:
# yolo模型计算,返回预测结果
result = model.detect_yolo()
print(result)
|
1 2 3 4 5 6 7 8 9 10 11 | from mpython import *
from mpython_classroom_kit import *
# 加载20classes yolo模型
model.select_model(model.CLASS_20_YOLO)
while True:
# yolo模型计算,返回预测结果
result = model.detect_yolo()
print(result)
|
1 2 3 4 5 6 7 8 9 10 11 | from mpython import *
from mpython_classroom_kit import *
# 加载Mnist手写数字 MobileNet模型
model.select_model(model.MNIST_NET)
while True:
# MobileNet模型计算,返回预测结果
result = model.predict_net()
print(result)
|
摄像头¶
-
camera.reset()¶
重置并初始化摄像头
-
camera.run()¶
启动/关闭芯片捕获图像。1表示开启,0 表示停止。
-
camera.snapshot()¶
控制摄像头捕捉单帧图像
-
camera.set_pixformat(format)¶
用于设置摄像头像素模式。
format- 帧格式
camera.GRAYSCALE- 4, 8-bits 每像素的灰度图camera.RGB565- 2, 16-bits 每像素
-
camera.set_contrast()¶
设置摄像头对比度,范围为[-2,+2]
-
camera.set_brightness()¶
设置摄像头亮度,范围为[-2,+2]
-
camera.set_saturation()¶
设置摄像头饱和度,范围为[-2,+2]
-
camera.set_auto_gain(enable, gain_db)¶
设置摄像自动增益模式
enable- 1 表示开启自动增益 0 表示关闭自动增益gain_db- 关闭自动增益时,设置的摄像头固定增益值,单位为db
-
camera.set_auto_whitebal(enable)¶
设置摄像自动白平衡模式,默认打开。True 为打开, False 为关闭自动白平衡。
注解
若您想追踪颜色,则需关闭白平衡。
-
camera.set_windowing()¶
设置摄像头窗口大小。例如:你可以 set_windowing((224,224)) , 然后 snapshot() 以捕捉由摄像头输出的320*240分辨率的224x224中心像素。您可使用窗口来获得定制的分辨率。
-
camera.set_hmirror()¶
设置摄像头水平镜像。1 表示开启水平镜像 0 表示关闭水平镜像。
-
camera.set_vflip()¶
设置摄像头垂直翻转。1 表示开启垂直翻转 0 表示关闭垂直翻转。
lcd显示屏¶
-
lcd.init(freq=15000000, color=lcd.BLACK)¶
初始化 LCD 屏幕显示。
freq- SPI 的通讯速率
color- LCD 初始化的颜色。默认 lcd.BLACK 。可以是16位的 RGB565 颜色值,比如 0xFFFF;或者RGB元组, 比如 (236, 36, 36)。或者以下定义的color常量;
lcd.BLACK0 黑 lcd.NAVY15 深蓝 lcd.DARKGREEN992 深绿 lcd.DARKCYAN1007 深青 lcd.MAROON30720 褐红 lcd.PURPLE30735 紫色 lcd.OLIVE31712 橄榄绿 lcd.LIGHTGREY50712 浅灰 lcd.DARKGREY31727 深灰 lcd.BLUE31 蓝 lcd.GREEN2016 绿 lcd.RED63488 红 lcd.MAGENTA63519 洋红 lcd.YELLOW65504 黄 lcd.WHITE65535 白 lcd.ORANGE64800 橙 lcd.GREENYELLOW45029 黄绿 lcd.PINK63519 粉红
-
lcd.display(roi)¶
在 lcd 屏上显示图片帧。 roi 居于屏幕中心,且不匹配像素不会显示(即液晶屏以窗口形态显示 roi 的中心)
roi- 感兴趣区域的矩形元组(x, y, w, h)。若未指定,即为图像矩形。
-
lcd.clear()¶
将lcd屏清空为黑色或者指定的颜色。
-
lcd.draw_string(x, y, text, color)¶
在lcd屏上绘制文本。从(x,y)位置开始绘制text文本, color 为文本的颜色,可以为16位的 RGB565 颜色值或者color常量。
图像处理¶
-
image.load()¶
文件系统的图片加载。可以把图片存放至SD卡中,将对应图片文件路径作为该函数参数,将会创建该帧图片对象。支持bmp/pgm/ppm/jpg/jpeg格式的图像文件。
注意
使用时需要注意图片分辨率大小,过大的话会导致内存错误!
-
image.width()¶
返回当前图像帧的宽度。
-
image.hight()¶
返回当前图像帧的高度。
-
image.format()¶
返回当前图像帧的格式。返回用于灰度图的 camera.GRAYSCALE 、用于RGB图像的 camera.RGB565 。
-
image.size()¶
返回当前图像帧的大小,单位字节。
-
image.get_pixel(x, y)¶
返回(x, y)位置的像素值。灰度图返回灰度值,RGB图返回rgb元组。
-
image.set_pixel(x, y, pixel)¶
将(x, y) 位置的像素设置为pixel 。
-
image.mean_pool(x_div, y_div)¶
在图像中找到 x_div * y_div 正方形的平均值,并返回由每个正方形的平均值组成的修改图像。
此方法允许您在原来图像上快速缩小图像。
-
image.to_grayscale()¶
将图像转换为灰度图像。
-
image.to_rainbow()¶
将图像转换为彩虹图像。
-
image.copy(roi)¶
复制 roi 感兴趣的矩形区域(x, y, w, h),来生产新的图像帧。
-
image.save(path[, roi])¶
将图像的副本保存到 path 中的k210文件系统。
-
image.clear()¶
将图像中的所有像素设置为零(非常快)。
-
image.draw_line(x0, y0, x1, y1[, color[, thickness=1]])¶
在图像上绘制一条从(x0,y0)到(x1,y1)的线。 您可以单独传递x0,y0,x1,y1,也可以传递给元组(x0,y0,x1,y1)。
color- 是用于灰度或RGB565图像的元组。默认为白色。但是,您也可以传递灰度图像的基础像素值(0-255)或RGB565图像的字节反转RGB565值。thickness- 控制线的粗细像素。
-
image.draw_rectangle(x, y, w, h[, color[, thickness=1[, fill=False]]])¶
在图像上绘制一个矩形。 您可以单独传递x,y,w,h或作为元组(x,y,w,h)传递。
color- 是用于灰度或RGB565图像的元组。默认为白色。但是,您也可以传递灰度图像的基础像素值(0-255)或RGB565图像的字节反转RGB565值。thickness- 控制线的粗细像素。fill- 设置为True以填充矩形。
-
image.draw_circle(x, y, radius[, color[, thickness=1[, fill=False]]])¶
在图像上绘制一个圆形。 您可以单独传递x,y,半径 或 作为元组(x,y,radius)传递。
color- 是用于灰度或RGB565图像的元组。默认为白色。但是,您也可以传递灰度图像的基础像素值(0-255)或RGB565图像的字节反转RGB565值。thickness- 控制线的粗细像素。fill- 设置为True以填充圆形。
-
image.draw_string(x, y, text[, color[, scale=1[, x_spacing=0[, y_spacing=0[, mono_space=True]]])¶
从图像中的(x, y)位置开始绘制8x10文本。您可以单独传递x,y,也可以作为元组(x,y)传递。
text- 是写入图像的字符串。 n, r, 和 rn 结束符将光标移至下一行。color- 是用于灰度或RGB565图像的元组。默认为白色。但是,您也可以传递灰度图像的基础像素值(0-255)或RGB565图像的字节反转RGB565值。scale- 增加图像上文本的大小,仅整数值。x_spacing- 允许你在字符之间添加(如果是正数)或减去(如果是负数)x像素,设置字符间距。y_spacing- 允许你在字符之间添加(如果是正数)或减去(如果是负数)y像素,设置行间距。mono_space- 默认为True,强制文本间距固定。对于大文本,这看起来很糟糕。设置False以获得非固定宽度的字符间距。
-
image.draw_cross(x, y[, color[, size=5[, thickness=1]]])¶
在图像上绘制一个十字。 您可以单独传递x,y或作为元组(x,y)传递。
color- 是用于灰度或RGB565图像的RGB元组。默认为白色。但是,您也可以传递灰度图像的基础像素值(0-255)或RGB565图像的字节反转RGB565值。size- 控制十字线的延伸长度。thickness- 控制边缘的像素厚度。
-
image.draw_arrow(x0, y0, x1, y1[, color[, thickness=1]])¶
在图像上绘制一条从(x0,y0)到(x1,y1)的箭头。 您可以单独传递x0,y0,x1,y1,也可以传递给元组(x0,y0,x1,y1)。
color- 是用于灰度或RGB565图像的元组。默认为白色。但是,您也可以传递灰度图像的基础像素值(0-255)或RGB565图像的字节反转RGB565值。thickness- 控制线的粗细像素。
-
image.binary(thresholds[, invert=False[, zero=False[, mask=None[, to_bitmap=False[, copy=False]])¶
根据像素是否在阈值列表 thresholds 中的阈值内,将图像中的所有像素设置为黑色或白色。
thresholds 必须是元组列表。 [(lo, hi), (lo, hi), ..., (lo, hi)] 定义你想追踪的颜色范围。对于灰度图像,每个元组需要包含两个值 - 最小灰度值和最大灰度值。 仅考虑落在这些阈值之间的像素区域。 对于RGB565图像,每个元组需要有六个值(l_lo,l_hi,a_lo,a_hi,b_lo,b_hi) - 分别是LAB L,A和B通道的最小值和最大值。为方便使用,此功能将自动修复交换的最小值和最大值。此外,如果元组大于六个值,则忽略其余值。相反,如果元组太短,则假定其余阈值处于最大范围。
-
image.invert()¶
将二进制图像0(黑色)变为1(白色),1(白色)变为0(黑色),非常快速地翻转二进制图像中的所有像素值。
-
image.erode(size[, threshold[, mask=None]])¶
腐蚀效果,从分割区域的边缘删除像素。腐蚀是原图中的高亮区域被蚕食,效果图拥有比原图更小的高亮区域。
这一方法通过卷积图像上((size*2)+1)x((size*2)+1)像素的核来实现,如果相邻像素集的总和小于 threshold ,则对内核的中心像素进行归零。 若 threshold 未设定,这个方法的功能如标准腐蚀方法一样。若 threshold 设定,您就可以指定腐蚀的特定像素,例如:设置低于2个的像素周围阈值为2。mask 是另一个用作绘图操作的像素级掩码的图像。掩码应该是一个只有黑色或白色像素的图像,并且应该与你正在绘制的 image 大小相同。 仅掩码中设置的像素被修改。
-
image.dilate(size[, threshold[, mask=None]])¶
膨胀效果,将像素添加到分割区域的边缘中。膨胀就是对图像高亮部分进行“领域扩张”,效果图拥有比原图更大的高亮区域。
这一方法通过卷积图像上((size*2)+1)x((size*2)+1)像素的核来实现,如果相邻像素集的总和大于 threshold ,则将内核的中心像素进行设置。若 threshold 未设定,这个方法的功能如标准腐蚀方法一样。 若threshold设定,您就可以指定腐蚀的特定像素,例如:设置低于2个的像素周围阈值为2。mask 是另一个用作绘图操作的像素级掩码的图像。掩码应该是一个只有黑色或白色像素的图像,并且应该与你正在绘制的 image 大小相同。仅掩码中设置的像素被修改。
-
image.negate()¶
非常快速地翻转(数字反转)图像中的所有像素值。对每个颜色通道的像素值进行数值转换。例: (255 - pixel).
-
image.mean(size, [threshold=False, [offset=0, [invert=False, [mask=None]]]]])¶
使用盒式滤波器的标准均值模糊滤波。
Size- 是内核的大小。取1 (3x3 内核)、2 (5x5 内核)或更高值。threshold- 如果你想在滤波器的输出上自适应地设置阈值,你可以传递 threshold=True 参数来启动图像的自适应阈值处理, 他根据环境像素的亮度(核函数周围的像素的亮度有关),将像素设置为1或者0。offset负数 offset 值将更多像素设置为1,而正值仅将最强对比度设置为1。invert- 以反转二进制图像的结果输出。mask- 是另一个用作绘图操作的像素级掩码的图像。掩码应该是一个只有黑色或白色像素的图像,并且应该与你正在绘制的 image 大小相同。 仅掩码中设置的像素被修改。
-
image.mode(size[, threshold=False, offset=0, invert=False, mask])¶
在图像上运行众数滤波,用相邻像素的模式替换每个像素。这一方法在灰度图上运行效果良好。但由于这一操作的非线性特性,会在RGB图像边缘上产生许多伪像。
Size- 是内核的大小。取1 (3x3 内核)、2 (5x5 内核)。threshold- 如果你想在滤波器的输出上自适应地设置阈值,你可以传递 threshold=True 参数来启动图像的自适应阈值处理, 他根据环境像素的亮度(核函数周围的像素的亮度有关),将像素设置为1或者0。offset- 负数 offset 值将更多像素设置为1,而正值仅将最强对比度设置为1。invert- 设置 invert 以反转二进制图像的结果输出。mask- 是另一个用作绘图操作的像素级掩码的图像。掩码应该是一个只有黑色或白色像素的图像,并且应该与你正在绘制的 image 大小相同。 仅掩码中设置的像素被修改。
-
image.midpoint(size[, bias=0.5, threshold=False, offset=0, invert=False, mask])¶
在图像上运行中点滤波。此滤波器找到图像中每个像素邻域的中点((max-min)/2)。
size- 是内核的大小。取1 (3x3 内核)、2 (5x5 内核)或更高值。bias- 控制图像混合的最小/最大程度。0只适用于最小滤波,1仅用于最大滤波。您可以通过 bias 对图像进行最小/最大化过滤。threshold- 如果你想在滤波器的输出上自适应地设置阈值,你可以传递 threshold=True 参数来启动图像的自适应阈值处理, 他根据环境像素的亮度(核函数周围的像素的亮度有关),将像素设置为1或者0。offset- 负数 offset 值将更多像素设置为1,而正值仅将最强对比度设置为1。invert- 以反转二进制图像的结果输出。mask- 是另一个用作绘图操作的像素级掩码的图像。掩码应该是一个只有黑色或白色像素的图像,并且应该与你正在绘制的 image 大小相同。 仅掩码中设置的像素被修改。
-
image.cartoon(size[, seed_threshold=0.05[, floating_threshold=0.05[, mask=None]]])¶
使图像卡通化并使用flood-fills算法填充图像中的所有像素区域。 这通过使图像的所有区域中的颜色变平来有效地从图像中去除纹理。 为了获得最佳效果,图像应具有大量对比度,以使区域不会太容易相互渗透。
seed_threshold- 控制填充区域中的像素与原始起始像素的差异。floating_threshold- 控制填充区域中的像素与任何相邻像素的差异。mask- 是另一个用作绘图操作的像素级掩码的图像。掩码应该是一个只有黑色或白色像素的图像,并且应该与你正在绘制的 image 大小相同。 仅掩码中设置的像素被修改。
-
image.conv3(kernel)¶
通过卷积内核对图像进行卷积。
kernel- 用来卷积图像的内核,可为一个元组或一个取值[-128:127]的列表。
-
image.gaussian(size[, unsharp=False[, mul[, add=0[, threshold=False[, offset=0[, invert=False[, mask=None]]]]]]])¶
通过平滑高斯核对图像进行卷积。
size- 是内核的大小。取1 (3x3 内核)、2 (5x5 内核)或更高值。unsharp- 如果 unsharp 设置为True,那么这种方法不会仅进行高斯滤波操作,而是执行非锐化掩模操作,从而提高边缘的图像清晰度。mul- 用以与卷积像素结果相乘的数字。若不设置,则默认一个值,该值将防止卷积输出中的缩放。add- 用来与每个像素卷积结果相加的数值。mul- 可进行全局对比度调整,add可进行全局亮度调整。threshold- 如果你想在滤波器的输出上自适应地设置阈值,你可以传递 threshold=True 参数来启动图像的自适应阈值处理, 他根据环境像素的亮度(核函数周围的像素的亮度有关),将像素设置为1或者0。offset- 负数 offset 值将更多像素设置为1,而正值仅将最强对比度设置为1。invert- 反转二进制图像的结果输出。mask- 是另一个用作绘图操作的像素级掩码的图像。掩码应该是一个只有黑色或白色像素的图像,并且应该与你正在绘制的 image 大小相同。 仅掩码中设置的像素被修改。
-
image.bilateral(size[, color_sigma=0.1[, space_sigma=1[, threshold=False[, offset=0[, invert=False[, mask=None]]]]]])¶
通过双边滤波器对图像进行卷积。 双边滤波器使图像平滑,同时保持图像中的边缘。
size- 是内核的大小。取1 (3x3 内核)、2 (5x5 内核)或更高值。color_sigma- 控制使用双边滤波器匹配颜色的接近程度。增加此值可增加颜色模糊。space_sigma- 控制像素在空间方面相互模糊的程度。增加此值可增加像素模糊。threshold- 如果你想在滤波器的输出上自适应地设置阈值,你可以传递 threshold=True 参数来启动图像的自适应阈值处理, 他根据环境像素的亮度(核函数周围的像素的亮度有关),将像素设置为1或者0。offset- 负数 offset 值将更多像素设置为1,而正值仅将最强对比度设置为1。invert- 以反转二进制图像的结果输出。mask- 是另一个用作绘图操作的像素级掩码的图像。掩码应该是一个只有黑色或白色像素的图像,并且应该与你正在绘制的 image 大小相同。 仅掩码中设置的像素被修改。
-
image.linpolar([reverse=False])¶
图像从笛卡尔坐标到线性极坐标重新投影。线性极坐标重新投影将图像旋转转换为x平移。
reverse- 设置 reverse = True 可以在相反的方向重新投影。
-
image.logpolar([reverse=False])¶
图像从笛卡尔坐标到对数极坐标重新投影。对数极坐标重新投影将图像的旋转转换为x平移和缩放到y平移。
reverse- 设置 reverse = True 可以在相反的方向重新投影。
-
image.rotation_corr([x_rotation=0.0[, y_rotation=0.0[, z_rotation=0.0[, x_translation=0.0[, y_translation=0.0[, zoom=1.0]]]]]])¶
通过执行帧缓冲区的3D旋转来纠正图像中的透视问题。
x_rotation- 围绕x轴在帧缓冲器中旋转图像的度数(这使图像上下旋转)。y_rotation- 帧缓冲区中围绕y轴旋转图像的度数(即左右旋转图像)。z_rotation- 围绕z轴在帧缓冲器中旋转图像的度数(即,使图像旋转到适当位置)。x_translation- 旋转后将图像移动到左侧或右侧的单位数。因为这个变换是应用在三维空间的,单位不是像素…y_translation- 是旋转后将图像上移或下移的单位数。因为这个变换是应用在三维空间的,单位不是像素…zoom- 通过图像缩放的量。默认情况下1.0。
-
image.find_blobs(thresholds[, invert=False[, roi[, x_stride=2[, y_stride=1[, area_threshold=10[, pixels_threshold=10[, merge=False[, margin=0[, threshold_cb=None[, merge_cb=None]]]]]]]]]])¶
查找图像中所有色块,并返回一个包括每个色块的色块对象的列表。请观察 blob 对象以获取更多信息。
thresholds- 必须是元组列表。[(lo, hi), (lo, hi), ..., (lo, hi)]- 定义你想追踪的颜色范围。对于灰度图像,每个元组需要包含两个值-最小灰度值和最大灰度值。仅考虑落在这些阈值之间的像素区域。对于RGB565图像,每个元组需要有六个值(l_lo,l_hi,a_lo,a_hi,b_lo,b_hi) - 分别是LAB L,A和B通道的最小值和最大值。为方便使用,此功能将自动修复交换的最小值和最大值。此外,如果元组大于六个值,则忽略其余值。相反,如果元组太短,则假定其余阈值处于最大范围。invert- 反转阈值操作,像素在已知颜色范围之外进行匹配,而非在已知颜色范围内。roi- 感兴趣区域的矩形元组(x,y,w,h)。如果未指定,ROI即整个图像的图像矩形。操作范围仅限于roi区域内的像素。x_stride- 查找某色块时需要跳过的x像素的数量。找到色块后,直线填充算法将精确像素。若已知色块较大,可增加x_stride来提高查找色块的速度。y_stride- 查找某色块时需要跳过的y像素的数量。找到色块后,直线填充算法将精确像素。若已知色块较大,可增加y_stride来提高查找色块的速度。area_threshold- 若一个色块的边界框区域小于area_threshold,则会被过滤掉。pixel_threshold- 若一个色块的像素数小于pixel_threshold,则会被过滤掉。merge- 若为True,则合并所有没有被过滤掉的色块,这些色块的边界矩形互相交错重叠。margin- 可在相交测试中用来增大或减小色块边界矩形的大小。例如:边缘为1、相互间边界矩形为1的色块将被合并。threshold_cb- 可设置为用以调用阈值筛选后的每个色块的函数,以便将其从将要合并的色块列表中过滤出来。回调函数将收到一个参数:要被筛选的色块对象。然后回调函数需返回True以保留色块或返回False以过滤色块。merge_cb- 可设置为用以调用两个即将合并的色块的函数,以禁止或准许合并。回调函数将收到两个参数—两个将被合并的色块对象。回调函数须返回True以合并色块,或返回False以防止色块合并。合并色块使颜色代码追踪得以实现。每个色块对象有一个代码值
code,该值为一个位向量。 例如:若您在 image.find_blobs 中输入两个颜色阈值,则第一个阈值代码为1,第二个代码为2(第三个代码为4,第四个代码为8,以此类推)。 合并色块对所有的code使用逻辑或运算,以便您知道产生它们的颜色。这使得您可以追踪两个颜色,若您用两种颜色得到一个色块对象,则可能是一种颜色代码。若您使用严格的颜色范围,无法完全追踪目标对象的所有像素,您可能需要合并色块。最后,若您想要合并色块,但不想两种不同阈值颜色的色块被合并,只需分别两次调用
image.find_blobs,不同阈值色块就不会被合并。
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 |
# Blob Detection Example
from mpython import *
from mpython_classroom_kit import *
thresholds = [(0, 80, 15, 127, 15, 127), # generic_red_thresholds
(0, 80, -70, -10, 0, 30), # generic_green_thresholds
(0, 80, 23, 60, -88, -44)] # generic_blue_thresholds
# 关闭自动白平衡
camera.set_auto_whitebal(False)
camera.run(1)
# 找出最大色块函数
def find_max(blobs):
max_size = 0
for blob in blobs:
if blob.w()*blob.h() > max_size:
max_blob = blob
max_size = blob.w()*blob.h()
return max_blob
while True:
camera.snapshot() # Take a picture and return the image.
# find green blob
blobs = image.find_blobs([thresholds[1]], pixels_threshold=200, area_threshold=200)
if blobs:
# compare maximize blobs
max_blobs = find_max(blobs)
print("max_blobs:%s" % max_blobs)
# draw rect
image.draw_rectangle(max_blobs.rect())
# draw cross
image.draw_cross(max_blobs.cx(), max_blobs.cy())
lcd.display()
|
blob 类 -- 色块对象¶
色块对象是由 image.find_blobs() 返回的。
-
blob.rect()¶ 返回一个矩形元组(x, y, w, h) ,用于如色块边界框的 image.draw_rectangle 等 其他的 image 方法。
-
blob.x()¶ 返回色块的边界框的x坐标(int)。
-
blob.y()¶ 返回色块的边界框的y坐标(int)。
-
blob.w()¶ 返回色块的边界框的w坐标(int)。
-
blob.h()¶ 返回色块的边界框的h坐标(int)。
-
blob.pixels()¶ 返回从属于色块(int)一部分的像素数量。
-
blob.cx()¶ 返回色块(int)的中心x位置。
-
blob.cy()¶ 返回色块(int)的中心x位置。
-
blob.rotation()¶ 返回色块的旋转(单位:弧度)。如果色块类似铅笔或钢笔,那么这个值就是介于0-180之间的唯一值。 如果这个色块圆的,那么这个值就没有效用。如果这个色块完全不具有对称性,您只能由此得到0-360度的旋转。
-
blob.code()¶ 返回一个16位的二进制数字,其中为每个颜色阈值设置一个位,这是色块的一部分。 例如,如果您通过 image.find_blobs 来寻找三个颜色阈值,这个色块可以设置为0/1/2位。
注意:除非以 merge=True 调用 image.find_blobs ,否则每个色块只能设置一位。那么颜色阈值不同的多个色块就可以合并在一起了。您也可以用这个方法以及多个阈值来实现颜色代码跟踪。
-
blob.count()¶ 返回合并为这一色块的多个色块的数量。只有您以 merge=True 调用 image.find_blobs 时,这个数字才不是1。